Installing Platform IO
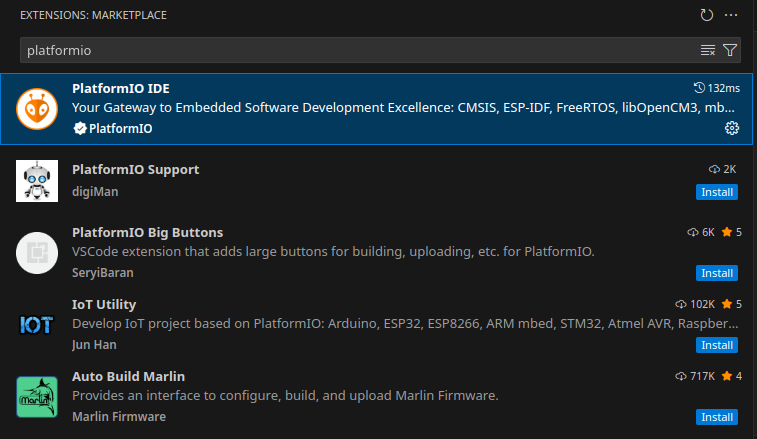
- Open Extension Tab in the activity bar
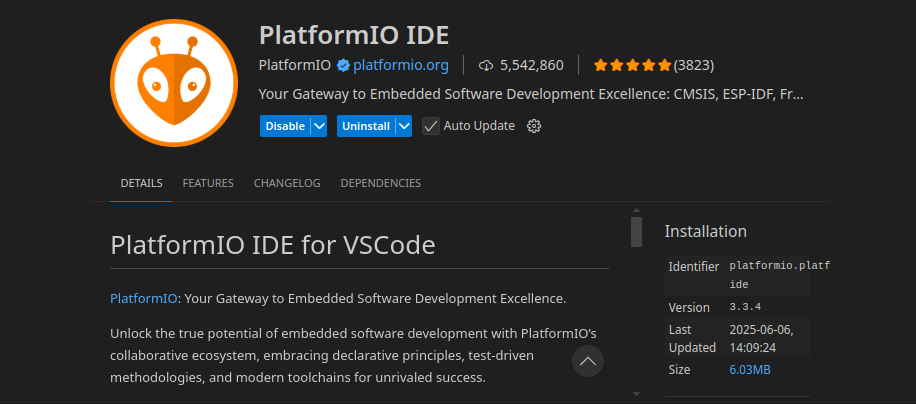
- Search for platform io and click install
Creating New Project

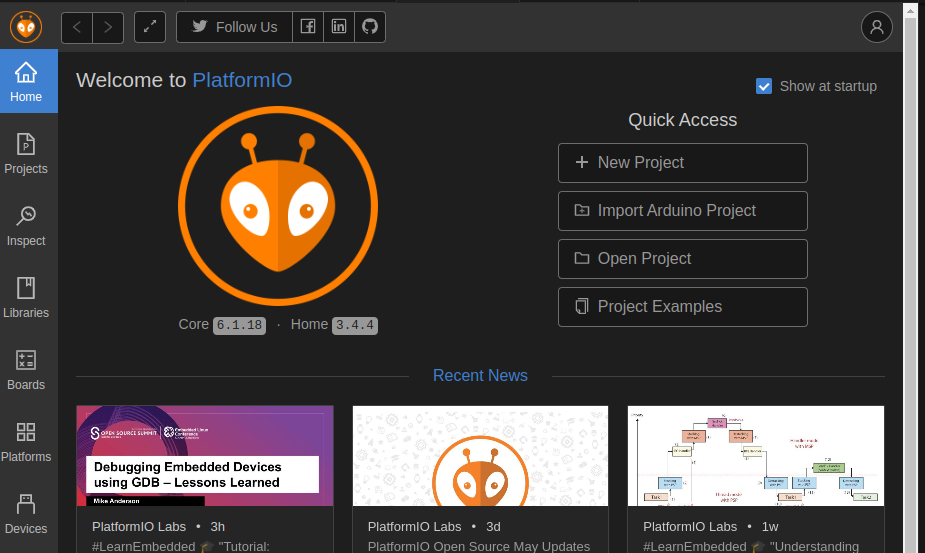
- Click the icon that look like alien in the activity bar
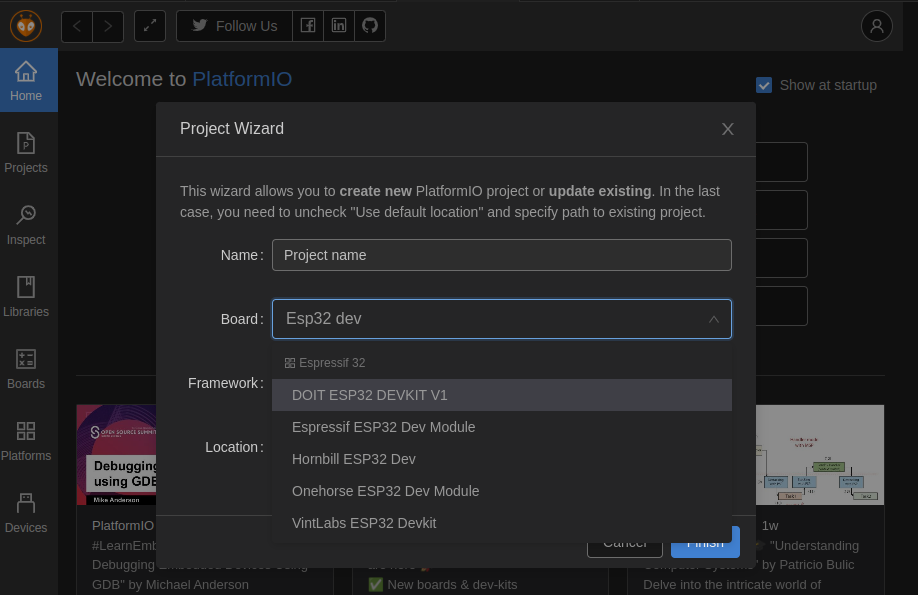
- New Project -> Select Board (Esp32 dev module) --> select default location (Documents/PlatformIO/Projects) -> Finish
This will create a project dirctory with the following contents
Test Project
├── include
│ └── README
├── lib
│ └── README
├── platformio.ini
├── src
│ └── main.cpp
└── test
└── README
src-> for storing source files (source code)include-> header file shared by all source files ,
the headers stored inincludescan be used in the following manner
#include "header.h"
int main (void)
{
...
}
lib/for project specific libraries
lib/
- mylib/
- mylib.c
- mylib.h
#include <mylib.h>
Publishing new Lib to Platfom io
- Create a new
library.jsonfile with the following contents
{
"name": "Robo",
"version": "0.0.1",
"description": "A library for Arduino/PlatformIO",
"keywords": "sensor, i2c, arduino",
"repository": {
"type": "git",
"url": "https://github.com/AI-Robot-GCEK/robo"
},
"authors": [
{
"name": "Arun CS",
"email": "aruncs31ss@gmail.com"
}
],
"license": "MIT",
"dependencies": {
"adafruit/Adafruit PWM Servo Driver Library": "3.0.2"
},
"frameworks": ["arduino"],
"platforms": ["atmelavr", "espressif32"]
}
- Change the appropriate contens like
nameto your own name
folder_name/
- src/
- .cpp
- .h
- examples/
library.json
Account Creation
pio account register -u username -p asdasdsa1@ --firstname Arun --lastname CS
Platform io lib structure
robo-movements
├── library.json
├── LICENSE
└── src
├── robo-movements.cpp
└── robo-movements.h
project
├── include
│ ├── configs.h
│ └── pins.h
├── lib
│ └── robo-database
│ └── src
│ ├── robo-database.cpp
│ └── robo-database.h
├── LICENSE
├── platformio.ini
├── README.md
├── src
│ └── main.cpp
└── test
└── README
Publishing New Lib
- Login to you account and publish new Lib using the following
Updating your lib
- create a new
git tagwith the same version number number that you given in thelibrary.json - then push the
tagto github
- now publish the update
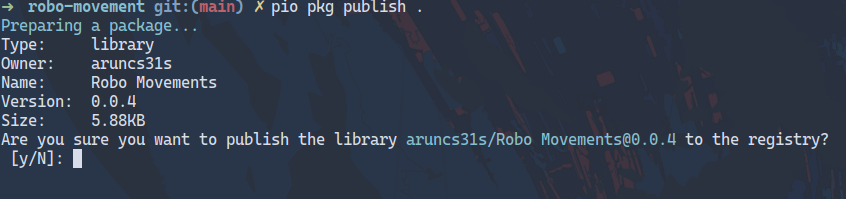
- it will ask for confirmation , check if everything is ok and type
yandEnter