Servo s1;
void setup(){
s1.attach(some_pin);
}
void loop(){
for (int i = 0 ; i < 180 ; ++ i){
s1.write(i);
}
}
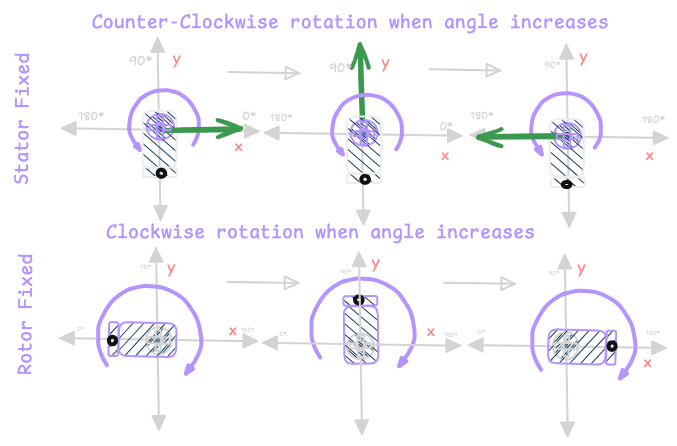
Fixed Body
motion_direction: counter clockwise
The rotating element is directly attached to the rotor and it will follow the same direction as the rotor.
Servo Horn is the rotor in this case
Fixed body will be the most common , because it is mostly seen when testing . And when testing we usually write the following
We usually observe this motion as something(something attached to the rotor) travels from
This movement happens if the rotor of the motor is not fixed. And if someone were to touch the rotor and if there enough friction between the rotor and the finger the body will start to move, and the movement of the body will be in oposite direction.
Fixed Rotor
motion_direction: clockwise
In this the rotor is fixed , this is mainly seen in linked motors[1]
motion of the moving part will be
linked motors in the sense that 2 or more motors connected together and they will form a "Z" like structure ↩︎